
Rubber Ducky
I bought a rubberducky from hak5 and this is what I learned:
Unboxing
The rubberducky has a button and a sd card. But to access these two things you need to open the USB stick following this tutorial
Arm the rubber ducky
You need to put the rubber ducky into “arming mode” by pressing the button on the inserted stick. Then you go to: Hak5 payloads.
You take one of these and copy the content of payload.txt into the payload studio.
Make sure you selected the correct language on payload studio:
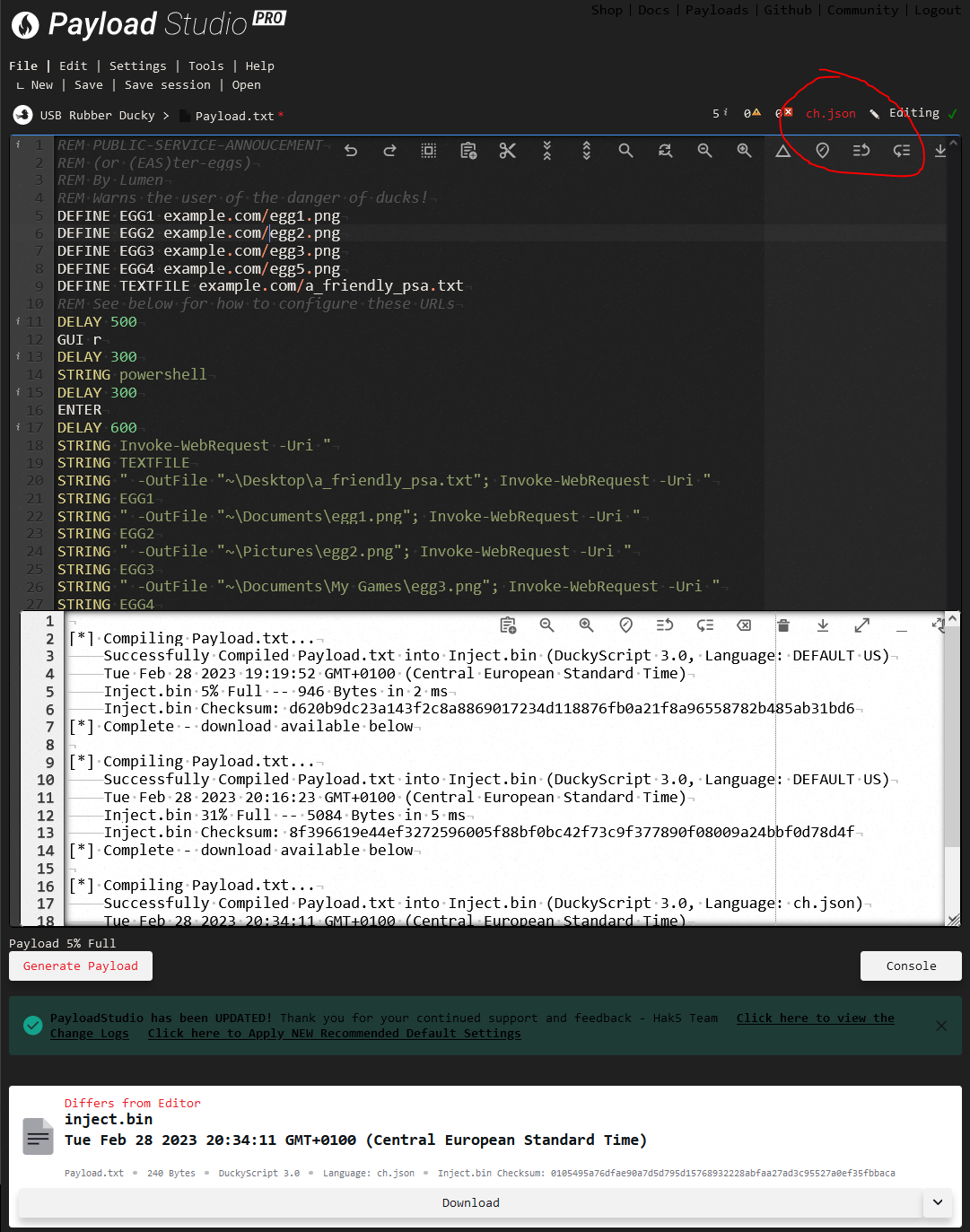
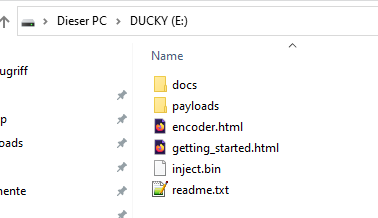
Then press “Generate Payload” and download the *.bin file and maybe also the other needed files from git if there are any. Put the *.bin file into the DUCKY flashdrive:
Run it
when you plug the rubberducky out its armed and when plugin it into an usb port its going to run its code.
